|
Figura 1. Imatges de satèl·lit. Diferències entre, dalt, una imatge Landsat TM de 2005 i un altra, baix, QuickBird de 2004 corresponent al nord de la ciutat de València. En ambdós casos es mostra una combinació de bandes en color fals. S’observa la gran diferència de resolució espacial entre les dues imatges. |
||
|
Advances in cartography: towards the third dimension En els darrers quinze anys assistim a una autèntica revolució en l’ampli camp de la cartografia, i molt especialment en la caracterització tridimensional del territori. Els avenços tecnològics estan canviant no només les eines i les fonts per conèixer la realitat geogràfica sinó fins i tot la manera d’estudiar-la, ara amb un detall insospitat fa pocs anys. Açò, però, no afecta només els especialistes, sinó que qualsevol persona pot percebre amb claredat aquesta revolució: només cal entrar des del nostre ordinador personal al Google Earth per visitar qualsevol lloc del planeta i disposar-ne d’una visió tridimensional amb una precisió senzillament aclaparadora. El canvi que vivim es fonamenta, sens dubte, en les millores tecnològiques de les darreres dècades, tant en el camp de posicionament geogràfic –sostingudes en bona mesura pels sistemes de posicionament global que proporcionen els satèl·lits artificials i els avenços en la geodèsia– com en el de la captació massiva de dades geogràfiques –amb el desenvolupament de sensors aerotransportats cada vegada més precisos i potents– i en la gestió que se’n fa –amb el desenvolupament dels sistemes d’informació geogràfica (SIG). Tanmateix, els nous sistemes de captació de la informació registren, bàsicament, dades molt semblants a les que recollien tradicionalment els topògrafs. De manera que bona part de la informació geogràfica que avui ens sorprèn per la seua disponibilitat ja existia fa molts anys en els mapes topogràfics tradicionals. Què ha canviat realment? Des de la nostra perspectiva, fonamentalment han canviat tres coses: la manera en què ara disposem de la informació, el nivell de precisió i l’amplitud de l’espai geogràfic abastat. Nous sistemes d’adquisició de la informació topogràfica La revolució que vivim va començar amb la millora de la captació de les dades. Els mètodes –topogràfics i fotogramètrics– tradicionals per localitzar amb planimetria i altimetria cada punt han avançat substancialment i, ensems, se n’han desenvolupat de nous, impensables fa pocs anys. La generalització de la fotografia aèria per a les anàlisis espacials a partir dels anys 1960 va implicar un salt qualitatiu que va permetre passar d’una informació aïllada obtinguda amb gran esforç sobre el camp, a l’observació directa del territori. La cartografia temàtica es va multiplicar davant la possibilitat de recollir molta informació diversa en el temps i l’espai. Altrament, als anys 1980, les imatges de satèl·lit abans restringides a fins militars es van començar a difondre. Els sensors permetien captar la radiació electromagnètica en diferents bandes, amb la qual cosa, a les imatges de l’espectre visible, se’n van sumar d’altres procedents de l’infraroig o fins i tot de les microones (radar). La precisió espectral (tres o quatre bandes de l’espectre electromagnètic), la radiomètrica (que permetia diferenciar uns 255 nivells digitals o nivells de gris en una imatge), l’espacial (centenars de metres) i temporal (setmanes) dels primers satèl·lits va millorar substancialment amb el temps i avui dia hi ha diverses generacions de sensors (sèries Ikonos, Orb-View, Spot 5, QuickBird, AVIRIS, CASI, ASTER…) que adquireixen informació de desenes de canals, amb una resolució espacial inferior a un metre (que en usos militars restringits pot ser de 20-30 cm), diferenciant milers de nivells digitals i amb una freqüència d’hores (figura 1). |
«Els avenços tecnològics estan canviant no només les eines i les fonts per conèixer la realitat geogràfica, sinó fins i tot la manera d’estudiar-la» |
|
|
Un dels objectius més antics de la cartografia és la localització exacta dels objectes. La georeferenciació, que abans només es podia assolir amb mètodes topogràfics, es pot fer avui dia mitjançant els GPS (sistema de posicionament global). Es tracta d’un sistema creat pel departament de Defensa dels EUA que es fonamenta en la determinació de la posició de qualsevol lloc on col·loquem una antena mitjançant la diferència de posicions respecte a distints satèl·lits que orbiten la Terra la posició exacta dels quals es coneix en cada instant. Aquest procediment permet localitzar un objecte referint-lo a un sistema de referència universal (el sistema WGS84) que, al mateix temps pot ser exportat als sistemes de referència estatals, en el nostre cas l’ED50, i a la projecció cartogràfica més adient, que per a nosaltres habitualment serà la UTM (Universal Transverse Mercator). La ubicació dels vint-i-quatre satèl·lits, que orbiten contínuament la Terra, és controlada per les estacions de seguiment. La posició d’un objecte es calcula mesurant la distància que el separa respecte a tres satèl·lits com a mínim, encara que per a una major precisió se’n necessiten quatre. Aquesta operació es fa calculant el temps que tarda un senyal de ràdio emès pel satèl·lit a arribar al receptor de GPS. Com que coneixem la velocitat del so, podem calcular la distància a la qual som dels satèl·lits. Avui dia els receptors de GPS poden incorporar mapes digitals que permeten seguir una trajectòria i conèixer-ne la posició en qualsevol moment. Les aplicacions per a la navegació aèria, marítima o terrestre són immenses i usar receptors de GPS s’ha fet habitual. La precisió intrínseca del sistema GPS, sense correcció i amb vuit satèl·lits, oscil·la entre sis i quinze metres. Aquesta precisió, més que suficient per a localitzar un objecte, s’ha millorat per a explotar-la científicament. Així, amb els sistemes de posicionament global en la seua forma diferencial en temps real (conegut com GPS-RTK) és possible determinar les coordenades del punt on es troba el receptor del senyal de manera immediata amb un grau de precisió inferior als ±5 cm en planimetria i de ±10-15 cm en altimetria. Això, per exemple permet fer mesures molt ràpides i precises d’espais canviants, com ara fer un seguiment de canvis de les platges o dunes, simplement recorrent-les amb un quad (figura 2) i posteriorment mesurant-ne els canvis (figura 3). Aquest és un bon sistema per alçar topogràficament àrees relativament menudes i/o canviants, ja que és precís, ràpid i barat. Per a zones més àmplies es poden ja utilitzar sistemes de mesura manejats des d’un avió. En aquest sentit els distanciòmetres làser han revolucionat la forma d’obtenir les dades topogràfiques. El LiDAR (acrònim de Light Detection and Ranging) aerotransportat és un equip que consta d’un distanciòmetre làser i d’un espill que desvia el feix de llum perpendicularment a la trajectòria de l’avió. Aquest desplaçament lateral combinat amb la trajectòria de l’avió permet agranar el terreny de sota. El sistema mesura la distància del sensor al terreny a partir del temps que tarda el raig de llum a arribar al terra i tornar al sensor. Si es coneixen les coordenades de l’avió en cada instant (cosa que s’aconsegueix amb un sistema GPS diferencial basat en un sistema inercial, que determina el canvi de posició) i l’angle de l’espill, es poden calcular les coordenades de cada punt que rep els senyals làser. El resultat d’un vol LiDAR és una col·lecció de punts amb coordenades precises que poden arribar a més de 30.000 punts per segon. A més, per cada pols laser emès, el sensor pot detectar el retorn de fins a dos ecos (o senyals), com també la intensitat de l’energia reflectida. Amb els dos ecos registrats de cada senyal s’obtenen dues informacions distintes: la primera marca la posició del primer element trobat, que no necessàriament és el terra sinó que pot ser un arbre o qualsevol altre objecte de la superfície terrestre; el segon –més energètic– és el senyal reflectit per la superfície més sòlida que hi ha per davall. El resultat del processament d’aquestes dues sèries de dades són dos models digitals del terreny (MDT): un és el model digital d’elevacions (és a dir, un model de les cotes o elevacions del terra encara que no sempre és un model perfecte, ja que pot haver-hi edificacions i altres elements) i l’altre és el que es coneix com model digital de superfície, que mostra la distribució de les cotes dels elements superposats. La comparació d’ambdós models pot aportar informació summament valuosa, no només per als treballs topogràfics sinó per a estudis forestals i ecològics. La resolució d’aquests models pot ser de fins un metre, amb una precisió vertical de ±15-20 cm i horitzontal de 0,30-1 m. Un altre dispositiu per a l’adquisició massiva de dades topogràfiques és el radar interferomètric d’obertura sintètica (InSAR) que des d’un avió pot obtenir imatges topogràfiques d’un territori. Els polsos d’energia en ona curta emesos pel dispositiu radar sobre la superfície de la terra i que tornen amb el senyal del terreny són rebuts per dues antenes que registren l’elevació (z) de coordenades geogràfiques precises (x, y). Les coordenades planimètriques són determinades mitjançant tecnologia GPS diferencial i sistemes inercials. Les imatges preses amb radar interferomètric tenen avantatges especials respecte a la resta dels sistemes per la possibilitat de registrar informació del sòl en qualsevol condició atmosfèrica –cosa especialment útil per a determinades àrees intertropicals on els núvols són quasi constants– i té capacitat per obtenir informació a nivell del sòl, travessant una coberta arbòria bastant densa. El grau de precisió, sense arribar a ser tan elevat com el del LiDAR, permet obtenir resultats molt detallats. |
Figura 2. Si col·loquem una antena mòbil d’un GPS-RTK sobre un vehicle de quatre rodes, podem registrar amb gran rapidesa la configuració topogràfica d’una zona. Aquest mètode s’ha mostrat especialment útil per al seguiment dels canvis morfològics en àrees molt canviants i fàcilment accessibles com són les platges. «Bona part de la informació geogràfica que avui ens sorprèn per la seua disponibilitat ja existia fa molts anys en els mapes topogràfics tradicionals»
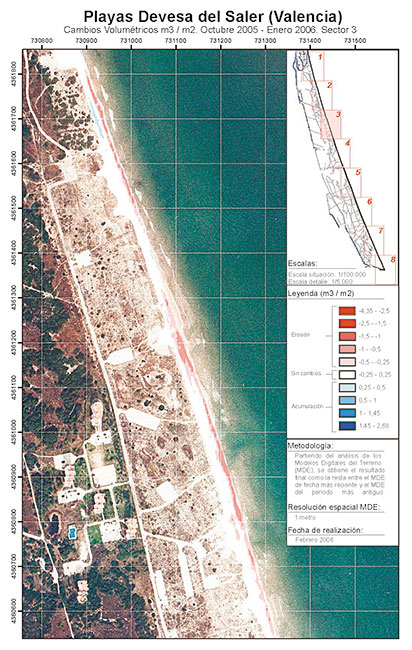
{rokbox tex=| Figura 3. A partir de dos MDE de la platja del Saler alçats amb GPS-RTK en dates distintes (octubre 2005 i gener de 2006) s’han obtingut les diferències i es pot observar com han canviat en cada lloc. En roig es representen els espais amb pèrdues i en blau els guanys. Com a base es mostra una ortofotografia que permet localitzar fàcilment els fenòmens. |
|
|
Els canvis, tanmateix, no afecten només la capacitat de veure i analitzar d’una altra manera la realitat geogràfica, sinó que a més n’augmenten força el detall i l’exactitud. Els avenços esdevinguts en aquests darrers anys en l’adquisició d’informació geogràfica –i molt especialment topogràfica– fan que avui en dia la principal preocupació de topògrafs i cartògrafs ja no siga adquirir més dades, sinó processar ràpidament i eficientment aquestes dades que ens arriben de manera massiva. El problema s’ha resolt en part mitjançant els SIG, complexos programes informàtics que permeten emmagatzemar la informació del territori organitzada per capes i localitzada geogràficament. Aquests sistemes faciliten la gestió d’aquesta informació manipulant-la i interrelacionant-la, com també obtenir-ne de nova (figura 4). De manera simplista podríem indicar que el SIG funciona com una base de dades amb informació geogràfica de caràcter alfanumèric, que té associat un identificador geogràfic. D’aquesta manera hom pot conèixer els atributs o la localització de qualsevol objecte. A més, en ser la informació de caràcter numèric, permet operar matemàticament amb les diferents capes. Així doncs, la localització, l’observació de canvis temporals i espacials, el compliment de determinades condicions i la creació d’informació nova són algunes de les funcions habituals d’un SIG. En un SIG podem introduir ortofotos, imatges de satèl·lit, dades topogràfiques (corbes de nivell) i qualsevol altra informació espacial (vies de comunicació, ciutats, indústries, infraestructures sanitàries, etc.) (figura 4). Aquesta informació pot ser de tipus raster (dues dimensions) o vectorial (lineal o puntual). Encara que la majoria dels SIG són de tipus comercial (ArcGis, Mapinfo, Idrisi, Geographics, Miramon, etc.) i funcionen amb llicències de pagament, a Internet n’han aparegut de gratuïts (GRASS GIS, JUMP, gvSIG, SAGA GIS, etc.). Models Digitals del Terreny Avui dia disposem de la informació de posicionament –definit per les tres coordenades espacials, x, y, z (longitud, latitud i altitud)– dels objectes geogràfics de forma explícita, quan fins fa uns anys hi era només implícita. Què volem dir amb açò? Quan un usuari agafa un mapa topogràfic pot deduir, si sap llegir les corbes de nivell, a quina cota està qualsevol lloc de la zona cartografiada. Li caldrà només resoldre –mentalment– una senzilla equació de primer grau. Per això, podem dir que qui sap llegir un mapa topogràfic pot reconèixer sense problemes quin és el relleu d’un lloc determinat. Aquest reconeixement, però, es fa mentalment i, per tant, no és tan senzill explicitar-lo de manera gràfica ni tampoc resulta gens fàcil operar matemàticament amb aquesta realitat només «mentalment» definida. Disposar de la informació en format digital pot explicitar aquesta configuració que implícitament ja era al mapa topogràfic. Els models digitals del terrenys (MDT) són un conjunt de dades numèriques que descriuen la distribució espacial d’una característica del territori, com ara l’elevació (en aquest cas els anomenem models digitals d’elevació, MDE). Disposant la informació en format digital, hi ha la possibilitat de presentar-la de manera més suggerent que no en la tradicional forma bidimensional d’un mapa. Així, es poden fer visualitzacions tridimensionals i fins i tot és possible desplaçar la posició del punt de vista, com si volàrem, per damunt d’aquesta realitat virtual tridimensional sobre la qual, a més, es pot superposar una imatge detallada de la superfície i aconseguir una visió summament realista: una visita al Google Earth exemplifica el que diem millor que qualsevol altra explicació. El desenvolupament d’aquesta tecnologia deu molt als interessos militars i, també, al món dels videojocs. La disponibilitat de les dades topogràfiques sobre tots els punts de la superfície geogràfica estudiada, que és el que conté un model digital d’elevacions, permet, a més de visualitzar la realitat, extraure informació relacionada directament amb la configuració topogràfica de manera ràpida i precisa. Així, per exemple, és senzill deduir directament el pendent de cada punt o la seua orientació, que en part podríem obtenir des d’un mapa topogràfic. Amb el MDE, però, podem calcular dades molt més difícils, com els valors de radiació solar directa que pot rebre cada punt d’un territori al llarg d’un any (figura 5) i que fins fa poc es resolia definint un espai simplement com de solana o d’ombria, o deduir els camins que seguirà l’escolament. Tot això invita a incloure la realitat tridimensional dins dels models de predicció dels processos naturals (de caràcter ecològic, hidrològic o geomorfològic). |
Figura 4. Estructura d’un SIG de l’illa de Menorca, format per una imatge de satèl·lit, un mapa de pendents, una capa amb la xarxa de drenatge, una altra amb depressions d’origen càrstic i una altra referida a la integral hipsomètrica de les conques de drenatge. «Avui dia, la principal preocupació de topògrafs i cartògrafs és processar ràpidament i eficientment les dades que ens arriben de forma massiva» |
|
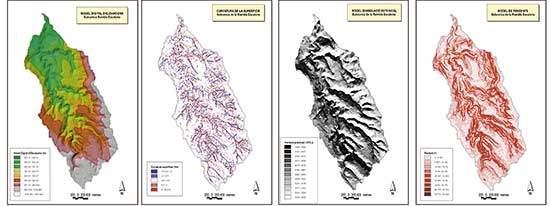 Figura 5. En la figura es mostren quatre models digitals del terreny. El model digital d’elevacions presenta la distribució de les elevacions o cotes del terreny. El model de la curvatura de la superfície representa les inflexions còncaves –representades en blau– i les convexes –representades en roig–. El model d’insolació potencial anual mostra uns valors de la diferent distribució de la energia solar al llarg d’un any. Per realitzar-lo, s’ha calculat la posició del sol a cada hora d’un dia de cada quinze i per a cada posició del sol s’ha avaluat quanta energia rebrà cada cel·la del model (en aquest cas de 10 x 10 metres) i quins punts del terreny quedaran il·luminats pel sol o romandran a l’ombra com a efecte de l’orografia. Finalment s’han integrat totes les dades per al conjunt d’un any. El model de pendents mostra aquesta variable topogràfica en graus. |
||
|
La popularització de la cartografia a Internet Un canvi molt significatiu que ha experimentat la cartografia en la segona meitat del segle xx ha estat la democratització. S’ha passat en unes dècades d’una cartografia quasi secreta, en mans dels exèrcits o dels estats, i molt limitada, a una enorme disponibilitat i fins i tot a la gratuïtat dels materials. Amb el temps s’han creat servidors que faciliten cartografia temàtica a qualsevol usuari. Els servidors permeten visualitzar mapes, la localització, la identificació d’atributs, les consultes senzilles i fins i tot la connexió a bases de dates remotes per a poder crear mapes temàtics. Altrament la cartografia topogràfica i els seus derivats s’estan escampant a través de la xarxa. Disposar de la informació topogràfica en forma de MDE fa que el recurs als tradicionals fulls del mapa topogràfic siga cada vegada menys necessari. En principi podem unir sense cap dificultat models contigus, creant així una realitat contínua, cosa decisiva per a múltiples aplicacions: per exemple per crear la cartografia dels camps de visió des de posicions específiques o definir les conques hidrogràfiques. Podem, per tant, parlar ja d’un mapa continu? La resposta és sí i no. En realitat, els productes disponibles estan sempre limitats a àrees concretes; ara bé, és cert que es disposa d’informació de gairebé totes les terres emergides del planeta. Durant onze dies de febrer del 2000 un transportador espacial de la NASA es dedicà a realitzar un alçament topogràfic del 80% de les terres del planeta utilitzant un radar interferomètric d’obertura sintètica. Aquest projecte, conegut com la Shuttle Radar Topography Mission (SRTM), liderat per la NASA/NGA, ha permès disposar d’un MDE quasi global del planeta amb una resolució espacial d’uns noranta metres i amb una precisió altimètrica d’uns setze metres que s’ha posat a disposició del conjunt de la comunitat científica i tècnica. Aquesta disponibilitat quasibé global d’informació està obrint una finestra a les anàlisis continentals amb unes dades de precisió limitada, però suficient, amb una qualitat homogènia i sense les limitacions que imposen els límits nacionals. Al mateix temps, per a molts països acaba sent la millor font d’informació geogràfica disponible. Fer-ne un ús constructiu de tot açò, però, és feina de tots. BIBLIOGRAFIA Josep E. Pardo Pascual. Departament d’Enginyeria Cartogràfica, Geodèsia i Fotogrametria. Universitat Politècnica de València. |
||

 |}images/stories/numeros/METODE_53/117b-53.jpg{/rokbox}
|}images/stories/numeros/METODE_53/117b-53.jpg{/rokbox}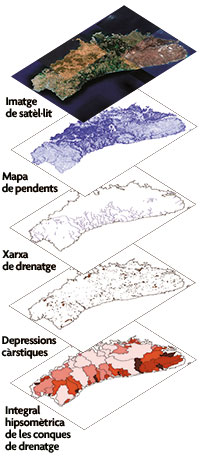
| Cartografia a la xarxa
Internet ha facilitat en pocs anys disposar dels materials cartogràfics i, en molts casos, de manera gratuïta. A continuació us detallem alguns recursos interessants. Servidors en xarxa
Servidors públics basats en servidors comercials És una eina orientada al maneig d’informació geogràfica desenvolupada des de la Conselleria d’Infraestructura i Transports de la Generalitat Valenciana. Es caracteritza per una interfície amigable, i és capaç d’accedir als formats més usuals de manera àgil, tant ràster com vectorial. Integra en una vista tant dades locals com remotes a través d’un origen WMS, WCS o WFS. Està orientada a usuaris finals d’informació de naturalesa geogràfica, bé siguen professionals o d’administracions públiques. Està desenvolupada en codi obert i, per la seua naturalesa permet als distints programadors i especialistes introduir-hi millores i noves extensions per a aplicacions específiques. Josep E. Pardo Pascual. Departament d’Enginyeria Cartogràfica, Geodèsia i Fotogrametria. Universitat Politècnica de València. |
Els avenços de la cartografia: cap a la tercera dimensió