Robots que semblen humans
Un breu repàs a la robòtica humanoide
Aquest article repassa breument la tecnologia robòtica humanoide. En primer lloc, es presenta el desenvolupament històric i el progrés en termes de maquinari dels robots humanoides bípedes de cos complet, juntament amb els avenços en generació de patrons per a la locomoció bípeda. Després es presenta el «moviment de cos sencer» –la coordinació de moviments de cames i braços per a aprofitar l’alt grau de llibertat dels humanoides–, seguit de la seua aplicació en disciplines com l’avaluació de dispositius i el muntatge a gran escala. També es tracta el tema dels humanoides de mig cos amb una base mòbil, utilitzats principalment en la investigació de les interaccions humà-robot i en la robòtica cognitiva, abans de centrar-se en els problemes actuals i en les perspectives de futur d’aquest camp.
Paraules clau: robots humanoides, robòtica, humanoides bípedes, interacció humà-robot.
Introducció
El terme robot humanoide (o simplement humanoide) sol referir-se a aquells robots amb forma semblant a la dels humans. No obstant això, la definició varia segons a qui preguntem: hi ha qui diu que un humanoide hauria de tenir un «cos complet» que incloga dos braços i dues cames, exactament com un humà, però altres se centren més en la comunicació o en la seua capacitat per a realitzar tasques i estenen la definició a un robot mòbil amb rodes que té «la meitat superior del cos», amb un cap, tors i dos braços. Aquest article pretén cobrir la investigació en robòtica humanoide en un sentit ampli per a mostrar les tendències globals d’investigació en aquesta disciplina.
Els humanoides bípedes i la seua història
La definició més restrictiva de robot humanoide indica que es tracta d’un robot bípede actuat 1 amb un tors, braços i un cap, dissenyat per a aconseguir algunes capacitats humanes. Comencem comentant aquest tipus d’humanoide.
«El terme robot humanoide sol referir-se a aquells robots la forma dels quals és semblant a la dels humans»
Hi ha un consens sobre el paper capdavanter del Japó en la investigació en robots humanoides fins aproximadament començament del segle xxi, mentre que ara s’estudien en quasi tot el món. El primer humanoide en l’entorn acadèmic va ser el WABOT-1 de Kato (WAseda roBOT-1), que pot caminar, reconèixer un objecte i manipular-lo amb les mans (Kato, Ohteru, Kobayashi, Shirai i Uchiyama, 1973) (Figura 1a). La seua manera de caminar és «quasiestàtica», amb passos estables que sempre mantenen el centre total de la massa dins del polígon de suport format pel contorn del peu (o peus) recolzat en el sòl. Encara que únicament es podia moure lentament, continua resultant sorprenent que pogueren desenvolupar un robot humanoide complet fa més de quaranta anys. En aquells primers anys, a causa principalment de les limitacions tecnològiques, no molta gent creia en els robots humanoides, que continuaven considerant-se ciència-ficció.
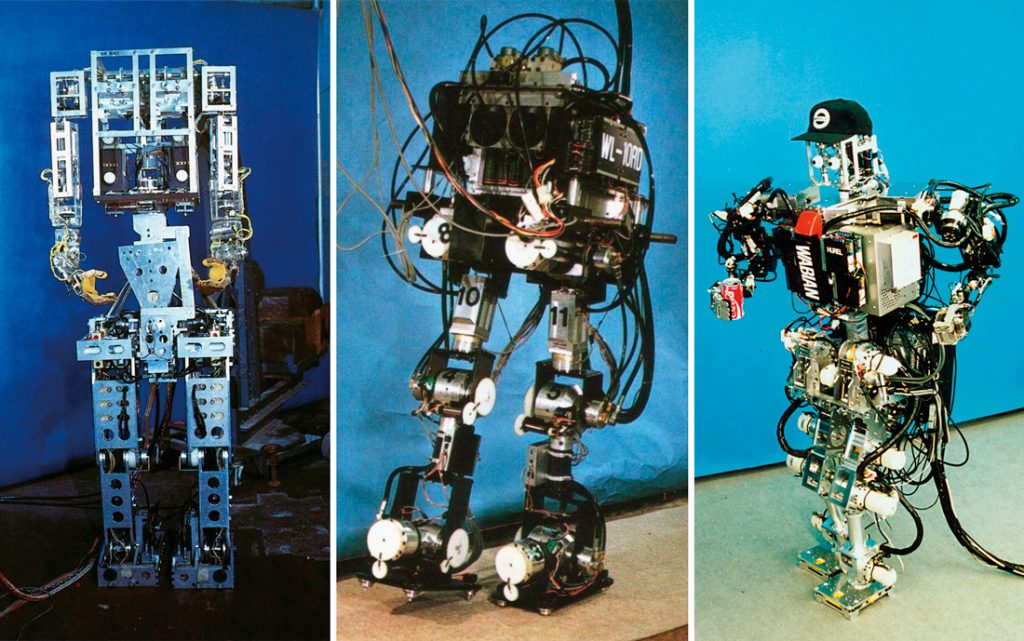
Figura 1. Robots humanoides creats per la Universitat de Waseda (Japó), on es va desenvolupar el primer humanoide en un entorn acadèmic. Fins a començaments del segle xxi, Japó va liderar la recerca en robots humanoides. D’esquerra a dreta: a) WABOT (WAseda roBOT); b) Waseda Leg (WL-10RD) i c) WABIAN (WAseda BIpedal HumANoid). / D’esquerra a dreta: Humanoid Robotics Institute, Universitat de Waseda (Tòquio, Japó); Atsuo Takanishi Laboratory, Universitat de Waseda (Tòquio, Japó); Atsuo Takanishi Laboratory, Universitat de Waseda (Tòquio, Japó).
Alguns investigadors van continuar treballant en el desplaçament dinàmic dels robots bípedes i alhora amb el desenvolupament del maquinari. Els professors Takanishi i Yamaguchi de la Universitat de Waseda al Japó van desenvolupar la WL (Waseda Leg, “cama de Waseda”) i la sèrie d’humanoides WABIAN (WAseda BIpedal humANoid, “humanoide bípede de Waseda”) (Figures 1b i 1c), amb estabilitat dinàmica en caminar. Els moviments de la meitat superior del cos es controlen mitjançant el concepte de punt de moment zero (Vukobratovic i Borovac, 2004), que es pot entendre com la versió dinàmica del centre de massa. Això és especialment útil durant els moviments dinàmics ràpids, ja que el robot no caurà sempre que el punt de moment zero es quede dins del polígon de suport, encara que el centre de massa se n’isca (Figura 2).
Mentrestant, en 1986, Honda R&D va llançar un projecte secret de robots humanoides i en 1996 va donar a conèixer el robot humanoide P2 (Prototype 2), resultat de deu anys d’investigació. P2 és un humanoide autònom d’1,82 m d’alçada i 210 kg capaç de caminar per control remot sense fil, pujar i baixar escales i espentar un carro. La seua sobtada aparició va causar sorpresa i commoció entre molts investigadors, però va tenir un efecte positiu, ja que va impulsar la investigació en humanoides per a aplicacions realistes i va mostrar que els humanoides ja no eren ciència-ficció.
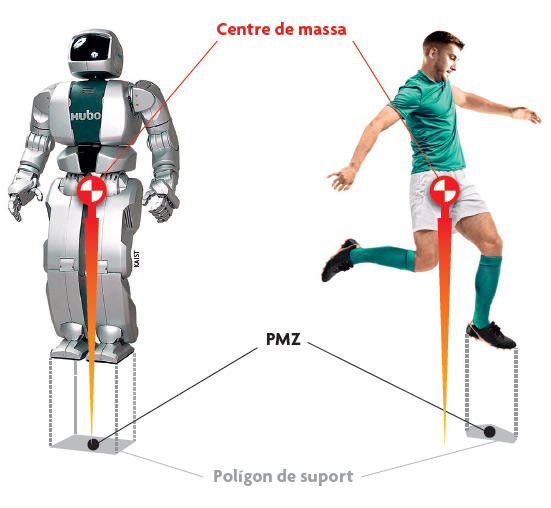
Figura 2. En un moviment quasi estàtic, el robot manté l’equilibri mentre el centre total de la seua massa roman dins del polígon de suport format pel contorn del peu (o peus) recolzat a terra. A mesura que va desenvolupant-se el desplaçament dinàmic per als robots bípedes, naix el concepte punt de moment zero (PMZ), un punt de suport que pot sostenir un moviment més dinàmic per part del cos (com el de la figura humana a la imatge) sense que aquest caiga, encara que el centre total de la massa se n’isca del polígon inicial de suport. / Mètode
Poc després, al Japó va començar un projecte nacional denominat HRP (Humanoid Research Project) amb l’ajuda de Honda i altres empreses per a desenvolupar robots humanoides que pogueren coexistir en la societat humana i col·laborar amb els humans. Honda va continuar millorant els seus robots humanoides: va crear el seu Prototype 3 i, finalment, ASIMO (Advanced Step in Innovative MObility, “pas avançat en mobilitat innovadora”) que pot saltar i córrer, servir te, i carregar la seua pròpia bateria (Figura 3). El projecte HRP va acabar en 2003 amb l’HRP-2 (Figura 4a) com a resultat del seu desenvolupament de maquinari. Durant aquest temps, es va establir la generació de patrons de pas bípedes. L’equip de Shuuji Kajita va aplicar el control de previsualització o control predictiu per model per a computar els passos a partir de la trajectòria del punt de moment zero desitjat, derivada dels passos desitjats i basada en un model lineal simplificat de pèndol invertit (Kajita, Hirukawa, Harada i Yokoi, 2014; Kajita et al., 2003). Com a resultat, el control de previsualització permet calcular la velocitat del centre de massa en temps real tenint en compte la progressió futura del punt de moment zero mitjançant el model de control predictiu, la qual cosa es tradueix en moviments suaus en caminar. Aquest mètode es basa en una tècnica d’optimització (Wieber, 2008) que limita el punt de moment zero a una àrea determinada dins polígon de suport. Encara que el model lineal de pèndol invertit és bastant simple, s’ha demostrat que es pot generar un patró pràctic de pas dinàmic mitjançant un sistema de control predictiu, un dels mètodes estàndard per a generar locomoció bípeda.
Els següents projectes d’HRP van produir plataformes de maquinari com HRP-3 –amb una estructura forta per a ús industrial– i Cybernetic Human HRP-4C –amb una forma més pareguda a la humana per a usos relacionats amb l’entreteniment, com es pot veure en les figures 4b i 4c.
«Hi ha qui diu que un humanoide hauria de tenir un “cos complet”, exactament com un humà, però d’altres se centren més en les seues habilitats»
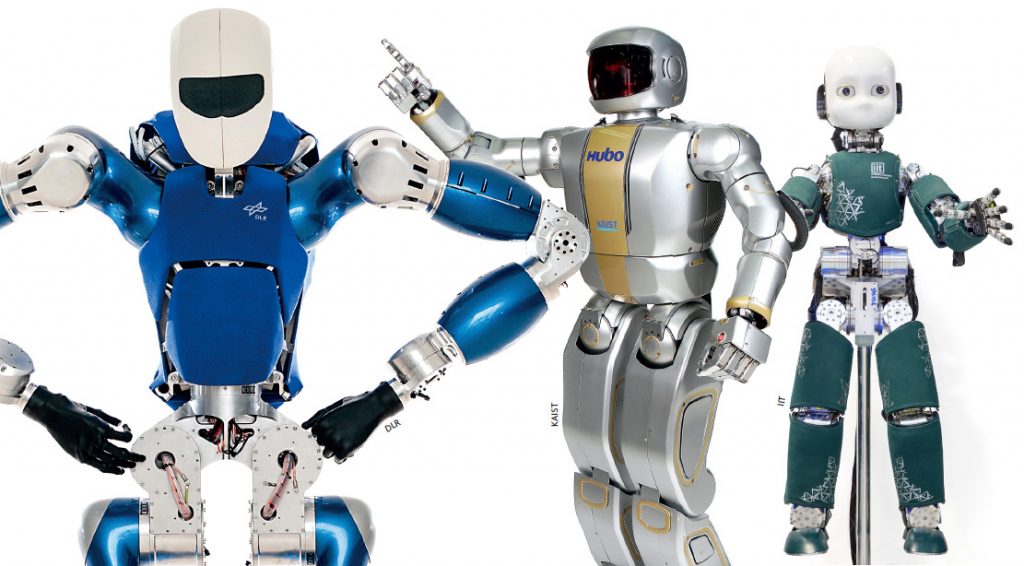
Tant d’HRP com d’altres projectes posteriors es va aprendre una lliçó: la importància de les plataformes compartides. Moltes universitats i institucions han utilitzat les plataformes HRP-2 i iCub, la qual cosa facilita compartir la càrrega del desenvolupament i els resultats. A més del programari habitual, les plataformes de desenvolupament –sovint de codi obert, com ara ROS i Gazebo, YARP i Choreonoid– també tenen un paper important per als investigadors, perquè els ajuden a compartir i intercanviar el seu programari més recent. Per exemple, la instal·lació d’HRP-2 en el Laboratori per a l’Anàlisi i l’Arquitectura de Sistemes del Centre Nacional Francès d’Investigacions Científiques (CNRS, per les seues sigles en francès) va ser el detonant de molts projectes col·laboratius d’investigació sobre robots humanoides en moltes institucions europees. Es van realitzar moltes publicacions conjuntes a través de projectes de la UE (Yoshida et al., 2009). Des de mitjan anys 2000 s’han desenvolupat diversos robots humanoides de cos sencer, incloent-hi WABIAN-2, TORO (Figura 5a), Hubo (Figura 5b), iCub (Figura 5c) i Talos, alguns dels quals també s’han utilitzat com a plataformes d’investigació per a projectes conjunts.
Mentrestant, també s’han construït robots humanoides petits de cos complet. Alguns exemples representatius d’aquests robots són HOAP-3 (Fujitsu), QRIO (Sony) i NAO (Softbank Robotics), alguns dels quals s’han comercialitzat i se solen utilitzar com a plataforma. Els avantatges d’aquests robots són el seu preu assequible i la facilitat per a fer experiments amb ells sense preocupar-se perquè patisquen greus danys en caure. La seua capacitat per a l’expressió corporal completa i la interacció basada en sensors també es pot utilitzar per a investigar les interaccions humà-robot i la robòtica cognitiva, descrita més avant en aquest article.

Figura 3. L’humanoide ASIMO va ser dissenyat per Honda R&D dins de la iniciativa Humanoid Research Project, que es va dur a terme en tot Japó cap a finals dels anys noranta i començament del segle xxi, amb l’objectiu de crear robots humanoides que pogueren coexistir i col·laborar amb humans. / wikipedia
Aplicacions i moviment de cos sencer
En 2005, just després de l’HRP, les característiques esperades dels robots humanoides eren les següents: 1) la forma ha de ser útil, 2) els humanoides han de poder utilitzar les ferramentes humanes habituals: per exemple, operar maquinària pesant en obres perilloses i 3) els humanoides han de poder treballar en els entorns socials humans habituals (Goswami i Vadakkepat, 2019; Kajita et al., 2014). Han passat més de deu anys i, per a la nostra sorpresa, la majoria d’aquestes prediccions s’estan convertint en realitat, com es comenta més avant. La tecnologia bàsica que s’espera per a permetre aquestes aplicacions és la planificació i control del moviment de «cos sencer», que genere no sols la locomoció bípeda sinó també els moviments coordinats de totes les extremitats, possiblement reproduint els moviments humans o mitjançant el contacte de múltiples punts amb objectes o amb l’entorn.
Una aplicació típica de la característica 1 és l’ús per a l’entreteniment o l’arxiu digital del patrimoni cultural immaterial. El Cybernetic Human HRP-4C (Kaneko et al., 2009) s’ha utilitzat com a ballarí o com a mestre de cerimònies. Un altre exemple n’és l’ús per a l’arxiu digital de la cultura tradicional, en perill per la falta de continuadors. Shin’ichiro Nakaoka i el seu equip van demostrar que el robot humanoide HRP-2 pot reproduir els moviments dinàmics humans de la dansa tradicional japonesa, la qual cosa mostra la possibilitat d’usar humanoides com a instructors de cultura tradicional, arxivant i reproduint moviments com aquests (Nakaoka et al., 2005). D’altra banda, Calinon i Billard van proposar un mètode per a imitar el moviment humà basant-se en un marc estadístic denominat «procés de Gauss» per a generar moviment humà (Calinon, D’halluin, Sauser, Caldwell i Billard, 2010).
Una altra aplicació emergent que aprofita la forma de l’humanoide és utilitzar-los per a avaluar dispositius portàtils en compte de fer-ho amb humans (Miura et al., 2013). Es pot fer que un robot humanoide amb forma i estructura semblant a la humana reproduïsca moviments registrats pels usuaris basant-se en una avançada tècnica de redirecció que transforme els moviments originals en moviments dels humanoides (Ayusawa i Yoshida, 2017). S’espera que aquesta aplicació aporte diversos avantatges per a solucionar alguns problemes dels experiments amb humans: l’avaluació quantitativa de l’efecte de suport (en compte de qüestionaris subjectius) –la qual cosa facilitaria procediments que tenen una forta càrrega ètica– i una alta repetibilitat de situacions pròximes a l’ús real. La Figura 6 mostra un exemple d’una d’aquestes aplicacions en què el robot humanoide HRP-4 porta posat un dispositiu de suport anomenat muscle suit (“vestit muscular”) (Kobayashi, Aida i Hashimoto, 2009) i avalua la seua potència de suport (Ito, Ayusawa, Yoshida i Kobayashi, 2017).
«Japó va liderar la investigació en robots humanoides fins a començament del segle XXI; Ara s’estudien en quasi tot el món»
Abans d’examinar les altres característiques (2 i 3), m’agradaria mencionar un incident important que va canviar el panorama de la investigació amb humanoides quasi per complet. Quan el gran terratrèmol va colpejar la regió japonesa de Tohoku i va provocar greus accidents en la central nuclear de Fukushima Daiichi, els robots humanoides presentats anteriorment no van poder utilitzar-se per a buscar víctimes soterrades entre les runes ni per a substituir els humans en operacions crítiques en entorns radioactius. A pesar de la desil·lusió, aquesta tragèdia va portar els investigadors en robòtica humanoide a centrar-se en les activitats humanitàries, especialment en la resposta a catàstrofes.
La competició DARPA Robotics Challenge (DRC) es va llançar amb aquesta idea. Els robots participants tenien un temps limitat per a completar tasques com conduir vehicles, obrir portes, rotar vàlvules, utilitzar ferramentes, travessar terreny difícil, pujar escales, etc. Les mencionades característiques 2 i 3 són molt rellevants per a les tasques requerides pel DRC. Com a resultat, s’ha progressat notablement en poc de temps. Això es pot atribuir a l’efecte de competició, que mobilitza moltes persones, a més de la distribució de les plataformes comunes mencionades anteriorment; en aquest cas, el robot humanoide d’actuació hidràulica Atles. Fins i tot amb el renou suscitat per la inutilitat dels humanoides en catàstrofes reals, el DRC va cridar l’atenció del públic i va revitalitzar la investigació activa i intensiva sobre humanoides. La diferència és que la investigació amb humanoides ara es porta a terme arreu del món, mentre que a finals dels noranta i començament dels 2000 es limitava a uns pocs organismes.

Figura 4. Robots humanoides desenvolupats en l’Institut Nacional de Ciència i Tecnologia Industrial Avançada (AIST, en les seues sigles en anglès) de Japó. D’esquerra a dreta: a) HRP-2, b) HRP-3 i c) Cybernetic Human HRP-4C. Es tracta de robots humanoides destinats a usos relacionats amb la indústria i l’entreteniment i que tenen una forma més pareguda a la humana. / AIST
Tot i que la seua utilitat definitiva seria la resposta a catàstrofes, l’ús d’«humanoides industrials» en la fabricació a gran escala s’està investigant de manera cada vegada més intensa des de fa uns anys, en cerca d’aplicacions més pròximes a les característiques 2 i 3. Un cas exemplar és la fabricació d’avions, un procés molt menys automatitzat que la indústria automobilística, ja que molts dels processos de muntatge es continuen realitzant manualment. Els treballadors humans solen fer tasques repetitives i avorrides en entorns reduïts, a vegades forçats a adoptar postures difícils, la qual cosa pot comportar greus problemes físics. S’espera que els robots humanoides executen aquestes faenes per a alliberar els treballadors humans de tasques «sense valor afegit» i que puguen concentrar-se en d’altres de més creatives i intel·ligents. A diferència de la resposta a catàstrofes, l’avantatge d’aquesta aplicació és que normalment tenim informació sobre l’entorn –per exemple, les dades de disseny assistit per computadora del muntatge d’un avió– que pot ajudar l’humanoide a ubicar-se basant-se en la informació sensorial (per exemple, la visió) que rep. Recentment, Airbus Group va col·laborar amb el CNRS i l’Institut Nacional de Ciència i tecnologia Industrial Avançada de Japó (AIST, per les seues sigles en anglès) per a desenvolupar tecnologies que permeteren als robots humanoides collar femelles i comprovar interruptors (Bolotnikova et al., 2017; Pfeiffer, Escande i Kheddar, 2017).
La tecnologia bàsica que permet aquestes tasques complexes és la planificació de moviment multicontacte, estudiada de manera intensiva per a ampliar el rang d’activitats (Borràs, Mandery i Asfour, 2017). Aquesta tècnica permet a un robot humanoide moure’s recolzant el cos en múltiples punts de l’entorn utilitzant no sols els peus sinó també els braços i altres parts del cos per a superar dificultats en el terreny, pujar una escala de mà o reptar en espais estrets. Una vegada es planifica aquesta seqüència de contactes, un controlador de cos sencer s’ocupa de generar i controlar la trajectòria per a seguir la ruta planejada.
«La tragèdia de Fukushima va portar els investigadors en robòtica humanoide a centrar-se en les activitats humanitàries»
Aquestes aplicacions no es limiten a la fabricació d’avions, sinó que poden aplicar-se a drassanes, a la construcció i al manteniment industrial. Ara que les empreses proposen diverses alternatives en la recerca de plataformes d’humanoides industrials de talla humana, és previsible que els humanoides s’utilitzen per a aplicacions pràctiques en el futur pròxim, a mesura que progressen les seues capacitats.
Humanoides mòbils de mig cos
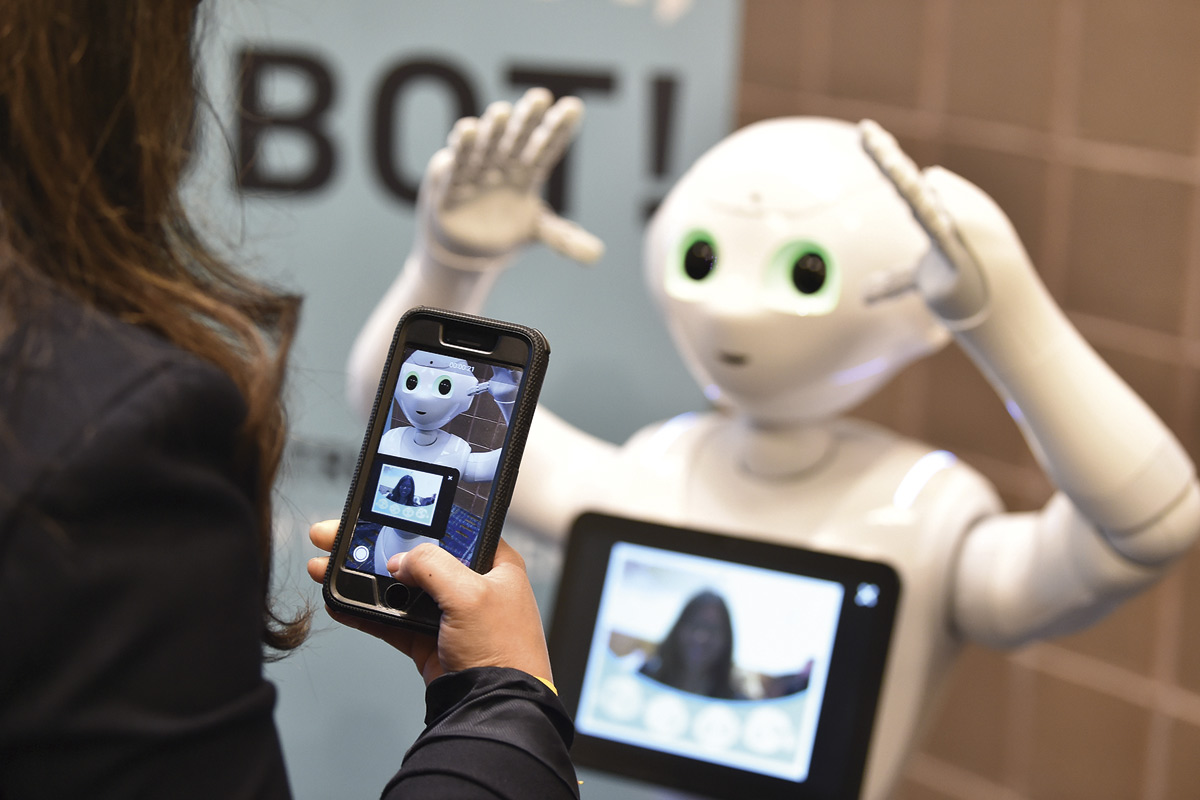
Fins al moment ens hem concentrat en els bípedes de cos sencer i les seues aplicacions per a l’execució de tasques, però els robots humanoides també s’han utilitzat molt per a investigar sobre la interacció humà-robot i la robòtica cognitiva. Per a això s’han dissenyat diversos humanoides amb la part superior del cos humà, normalment equipats amb una base mòbil amb rodes –en l’article ens hi referirem com a humanoides mòbils de mig cos– com Robovie, ARMAR-III, PR-2, i Pepper.
Els humanoides mòbils de mig cos són útils en la investigació de les interaccions humà-robot per la seua capacitat per a adoptar una gran varietat de comportaments combinant les trajectòries de la base mòbil i els moviments de la part superior del cos. Takayuki Kanda i el seu equip van dur a terme una sèrie d’estudis en què un robot humanoide interactuava i proporcionava serveis als éssers humans. L’humanoide Robovie es va introduir com a tutor per a ensenyar una llengua estrangera a nens (Kanda, Hirano, Eaton i Ishiguro, 2004), com a guia en un museu que pot reforçar l’experiència dels visitants (Shiomi, Kanda, Ishiguro i Hagita, 2006), i com a guia afectiu en un centre comercial. Aquests robots van mostrar la possibilitat d’utilitzar humanoides que interactuen amb els humans de manera proactiva, però que també utilitzen la seua capacitat cognitiva per a avançar-se a les intencions dels usuaris amb sensors a bord o ambientals i amb identificadors de radiofreqüència. Aquests experiments han donat resultats positius i prometedors per al desenvolupament de robots humanoides que oferisquen diversos serveis fins i tot en espais plens de gent.
Tamim Asfour i el seu equip van dur a terme una investigació en robòtica cognitiva i autònoma basant-se en la plataforma ARMAR-III, especialment en la interacció humà-robot i en tasques de manipulació autònoma d’objectes en entorns quotidians. ARMAR-III té un cap, dos braços redundants amb set graus de llibertat –cadascun amb una mà amb vuit graus de llibertat– connectats a una base omnidireccional mitjançant una articulació al maluc. Aprofitant aquests alts nivells de llibertat, van demostrar la seua capacitat per a organitzar plats i gots en un llavaplats i arreplegar un objecte mitjançant tècniques avançades de moviment i planificació de la subjecció (Asfour et al., 2008). Al cap té sensors auditius i visuals (Asfour, Welke, Azad, Ude i Dillman, 2008) per a entendre els comandaments de veu de l’usuari i reconèixer i localitzar objectes basant-se en les característiques visuals i en el reconeixement d’objectes per models en 3D.
«Els robots humanoides també s’han utilitzat per a investigar sobre la interacció humà-robot i la robòtica cognitiva»
La plataforma mòbil de dos braços PR-2 creada per Willow Garage també s’ha utilitzat per a la investigació general en robòtica, des de la planificació de tasques d’alt nivell fins a la planificació de moviment (Chitta, Cohen i Likhachev, 2010) i la subjecció d’objectes (Van den Berg, Miller, Goldberg i Abbeel, 2010). Recentment l’humanoide mòbil de mig cos Pepper (Figura 7) va començar a utilitzar-se també per a les interaccions educatives humà-robot (Tanaka et al., 2015) i per a altres treballs com a recepcionista o guia de diferents instal·lacions comercials o públiques.
Finalment, encara que no se’l caracteritza com a robot mòbil, m’agradaria mencionar el robot industrial de dos braços Nextage de Kawada Robotics Corp. És un robot amb dos braços que es pot implementar fàcilment i pot operar juntament amb els humans en fàbriques per a executar tasques d’arreplegada i col·locació en sistemes de producció per cèl·lules de poc volum i alta diversitat. La seua característica més excel·lent és la convivència en entorns humans gràcies a la seua baixa potència i gran capacitat per a realitzar tasques. És una de les aplicacions més representatives dels robots humanoides en la indústria i s’espera que el coneixement sobre la seua utilització s’estenga a altres dominis com el muntatge a gran escala i el manteniment de fàbriques, com s’ha mencionat anteriorment.
Resum i orientacions per al futur
Aquest article ofereix un breu resum dels robots humanoides, incloent-hi els aspectes històrics, el desenvolupament de maquinari i programari i les seues aplicacions. Com s’ha indicat anteriorment, la robòtica humanoide és una disciplina activa que continua creixent i avançant. A pesar del tremend progrés fins a la data, encara té marge de millora. Per si mateixa, la robòtica requereix la integració de diferents tecnologies de percepció, intel·ligència i generació de moviments, i m’agradaria remarcar que, a causa de la seua complexitat, els humanoides són els robots més exigents de tots.

Figura 6. Els humanoides poden ser utilitzats per a avaluar dispositius portàtils, el que evita alguns problemes dels experiments realitzats amb humans, com ara l’avaluació quantitativa de l’efecte de suport en lloc de qüestionaris subjectius. En les imatges, avaluació per l’humanoide HRP-4 del muscle suit, dispositiu pneumàtic assistencial que permet a un treballador humà alçar i transportar pesos majors del que podria per si mateix. / Ito et al., 2017
Perquè els robots humanoides realitzen tasques útils, és necessari incorporar la majoria de tecnologies perceptives: reconeixement d’entorns mitjançant senyals visuals, auditives i de profunditat, així com informació tàctil i de pressió. Aquesta última és la que requereix més millores en l’actualitat per a millorar el desenvolupament futur dels humanoides. La interacció física amb els entorns és l’habilitat més deficient dels robots humanoides actuals. Encara que s’estan realitzant intensos esforços, els robots humanoides continuen essent rígids i insensibles, i estan encara lluny de les interaccions físiques flexibles i suaus que poden realitzar els humans. Això també està relacionat estretament amb la tecnologia d’actuació. En els humanoides se solen utilitzar nous actuadors més flexibles, amb eficiència equivalent a la dels nostres músculs i que poden reemplaçar la combinació de motors elèctrics i engranatges mecànics. Els robots humanoides «rígids» disponibles actualment són vulnerables a danys, especialment quan cauen, i a més poden causar problemes greus si colpegen humans. Per tant, la robustesa del maquinari i el seu control són essencials. La robòtica tova fa dècades que desperta interès i també podem esperar avenços gràcies a la investigació interdisciplinària en biologia i ciència dels materials. Per descomptat, també s’haurien d’explorar tècniques de control per a explotar el progrés en percepció i actuació. Totes aquestes tecnologies en creixement són essencials per a aconseguir robots humanoides industrials d’alt rendiment com els mencionats anteriorment, que puguen realitzar tasques delicades de manera autònoma, col·laborant amb treballadors humans quan siga necessari.
«Els significatius avenços en intel·ligència artificial poden ser molt útils per al treball amb humanoides»
Finalment, però no menys important, la intel·ligència és indispensable a l’hora de tractar amb el físic complex dels humanoides, així com amb el seu entorn. En aquest article ens hem centrat en la investigació en humanoides, però els significatius avenços en intel·ligència artificial, especialment en aprenentatge automàtic, també poden ser molt útils per al treball amb humanoides. La intel·ligència avançada és necessària en qualsevol situació: per a comprendre i raonar sobre el seu entorn, per a prendre decisions i complir les tasques necessàries i per a interactuar amb éssers humans i amb l’entorn de manera adaptativa, estenent la interacció humà-robot i la tecnologia cognitiva. Les sinergies de la investigació multidisciplinària són més necessàries que mai per a portar la tecnologia humanoide a aplicacions en el món real, perquè aquests es convertisquen en els millors companys de l’ésser humà en el futur.
1 Un robot actuat és aquell que es mou mitjançant actuadors; és a dir, dispositius que transformen un senyal (generalment elèctric en aquest cas) en un moviment per part del robot. (Tornar al text)
REFERÈNCIES
Asfour, T., Azad, P., Vahrenkamp, N., Regenstein, K., Bierbaum, A., Welke, K., & Dillmann, R. (2008). Toward humanoid manipulation in human-centred environments. Robotics and Autonomous Systems, 56(1), 54–65. doi: 10.1016/j.robot.2007.09.013
Asfour, T., Welke, K., Azad, P., Ude, A., & Dillmann, R. (2008). The Karlsruhe humanoid head. En 2008 8th IEEE-RAS International Conference on Humanoid Robots, (pp. 447–453), Daejeon, Corea del Sud: IEEE. doi: 10.1109/ICHR.2008.4755993
Ayusawa, K., & Yoshida, E. (2017). Motion retargeting for humanoid robots based on simultaneous morphing parameter identification and motion optimization. IEEE Transactions on Robotics, 33(6), 1343–1357. doi: 10.1109/TRO.2017.2752711
Bolotnikova, A., Chappellet, K., Paolillo, A., Escande, A., Anbarjafari, G., Suarez-Roos, A., ... Kheddar, A. (2017). A circuit-breaker use-case operated by a humanoid in aircraft manufacturing. En 2017 13th IEEE Conference on Automation Science and Engineering, (pp. 15–22), Xi’an, Xina: IEEE. doi: 10.1109/COASE.2017.8256069
Borràs, J., Mandery, C., & Asfour, T. (2017). A whole-body support pose taxonomy for multi-contact humanoid robot motions. Science Robotics, 2(13), eaaq0560. doi: 10.1126/scirobotics.aaq0560
Calinon, S., D’halluin, F., Sauser, E. L., Caldwell, D. G., & Billard, A. (2010). Learning and reproduction of gestures by imitation. IEEE Robotics & Automation Magazine, 17(2), 44–54. doi: 10.1109/MRA.2010.936947
Chitta, S., Cohen, B., & Likhachev, M. (2010). Planning for autonomous door opening with a mobile manipulator. En 2010 IEEE International Conference on Robotics and Automation (pp. 1799–1806), Anchorage, EUA: IEEE. doi: 10.1109/ROBOT.2010.5509475
Goswami, A., & Vadakkepat, P. (Eds.). (2019). Humanoid robotics: A reference. Dordrecht: Springer.
Ito, T., Ayusawa, K., Yoshida, E., & Kobayashi, H. (2017). Human motion reproduction by torque-based humanoid tracking control for active assistive device evaluation. En 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (pp. 503–508), Birmingham, Regne Unit: IEEE. doi: 10.1109/HUMANOIDS.2017.8246919
Kajita, S., Hirukawa, H., Harada, K., & Yokoi, K. (2014). Introduction to humanoid robotics. Berlín: Springer. doi: 10.1007/978-3-642-54536-8
Kajita, S., Kanehiro, F., Kaneko, K., Fujiwara, K., Harada, K., Yokoi, K., & Hirukawa, H. (2003). Biped walking pattern generation by using preview control of zero-moment point. En 2003 IEEE International Conference on Robotics and Automation (pp. 1620–1626), Taipei, Taiwan: IEEE. doi: 10.1109/ROBOT.2003.1241826
Kanda, T., Hirano, T., Eaton, D., & Ishiguro, H. (2004). Interactive robots as social partners and peer tutors for children: A field trial. Human-Computer Interaction, 19(1), 61–64. doi: 10.1207/s15327051hci1901&2_4
Kaneko, K., Kanehiro, F., Morisawa, M., Miura, K., Nakaoka, S., & Yokoi, K. (2009). Cybernetic Human HRP-4C. En 2009 9th IEEE-RAS International Conference on Humanoid Robots (pp. 7–14), París, França: IEEE. doi: 10.1109/ICHR.2009.5379537
Kato, I., Ohteru, S., Kobayashi, H., Shirai, K., & Uchiyama, A. (1973). Information-power machine with senses and limbs. En P. Serafini, E. Guazzelli, B. Schrefler, F. Pfeiffer, & F. Rammerstorfer (Eds.), On theory and practice of robots and manipulators. Vol. I (pp. 11–24). Viena: Springer. doi: 10.1007/978-3-7091-2993-7
Kobayashi, H., Aida, T., & Hashimoto, T. (2009). Muscle suit development and factory application. International Journal of Automation Technology, 3(6), 709–715. doi: 10.20965/ijat.2009.p0709
Miura, K., Yoshida, E., Kobayashi, Y., Endo, Y., Kanehiro, F., Homma, K., … Tanaka, T. (2013). Humanoid robot as an evaluator of assistive devices. En 2013 IEEE International Conference on Robotics and Automation (pp. 679–685), Karlsruhe, Alemanya: IEEE. doi: 10.1109/ICRA.2013.6630646
Nakaoka, S., Nakazawa, A., Kanehiro, F., Kaneko, K., Morisawa, M., & Ikeuchi, K. (2005). Task model of lower body motion for a biped humanoid robot to imitate human dances. En 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 3157–3162), Edmonton, Canadà: IEEE. doi: 10.1109/IROS.2005.1545395
Pfeiffer, K., Escande, A., & Kheddar, A. (2017). Nut fastening with a humanoid robot. En 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 6142–6148), Vancouver, Canadà: IEEE. doi: 10.1109/IROS.2017.8206515
Shiomi, M., Kanda, T., Ishiguro, H., & Hagita, N. (2006). Interactive humanoid robots for a science museum. En Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, (pp. 305–312). Nova York: Association for Computing Machinery. doi: 10.1145/1121241.1121293
Tanaka, F., Isshiki, K., Takahashi, F., Uekusa, M., Sei, R., & Hayashi, K. (2015). Pepper learns together with children: Development of an educational application. En 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids) (pp. 270–275), Seül, Corea del Sud: IEEE. doi: 10.1109/HUMANOIDS.2015.7363546
Van den Berg, J., Miller, S., Goldberg, K., & Abbeel, P. (2010). Gravity-based robotic cloth folding. En D. Hsu, V. Islker, J.-C. Latombe, & M. C. Lin (Eds.), Algorithmic Foundations of Robotics IX (pp. 409–424). Berlín-Heidelberg: Springer. doi: 10.1007/978-3-642-17452-0_24
Vukobratovic, M., & Borovac, B. (2004). Zero-moment point. Thirty-five years of its life. International Journal of Humanoid Robotics, 1(1), 157–173. doi: 10.1142/S0219843604000083
Wieber, P. B. (2008). Viability and predictive control for safe locomotion. En 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 1103–1108), Niça, França: IEEE. doi: 10.1109/IROS.2008.4651022
Yoshida, E., Laumond, J.-P., Esteves, C., Kanoun, O., Mallet, A., Sakaguchi, T., & Yokoi, K. (2009). Motion autonomy for humanoids: Experiments on HRP-2 No. 14. Computer Animation and Virtual Worlds, 20 (5–6), 511–522. doi: 10.1002/cav.280